|
Stefanos Pertigkiozoglou I am a PhD student at the GRASP Lab of the University of Pennsylvania, advised by Kostas Daniilidis. I currently work in the intersection of Geometric Deep Learning and 3D Vision. I am interested in designing methods that enable models to handle and process geometric objects in both an efficient and consistent manner. The end goal of this fusion between learning algorithms and geometry is to be able to learn rich representations about the world that are able to correctly model its complex geometry. Before that I studied Electrical and Computer Engineering at NTUA , where under the supervision of Petros Maragos I worked on adversarial robustness of neural networks. |
|
Publications |
|
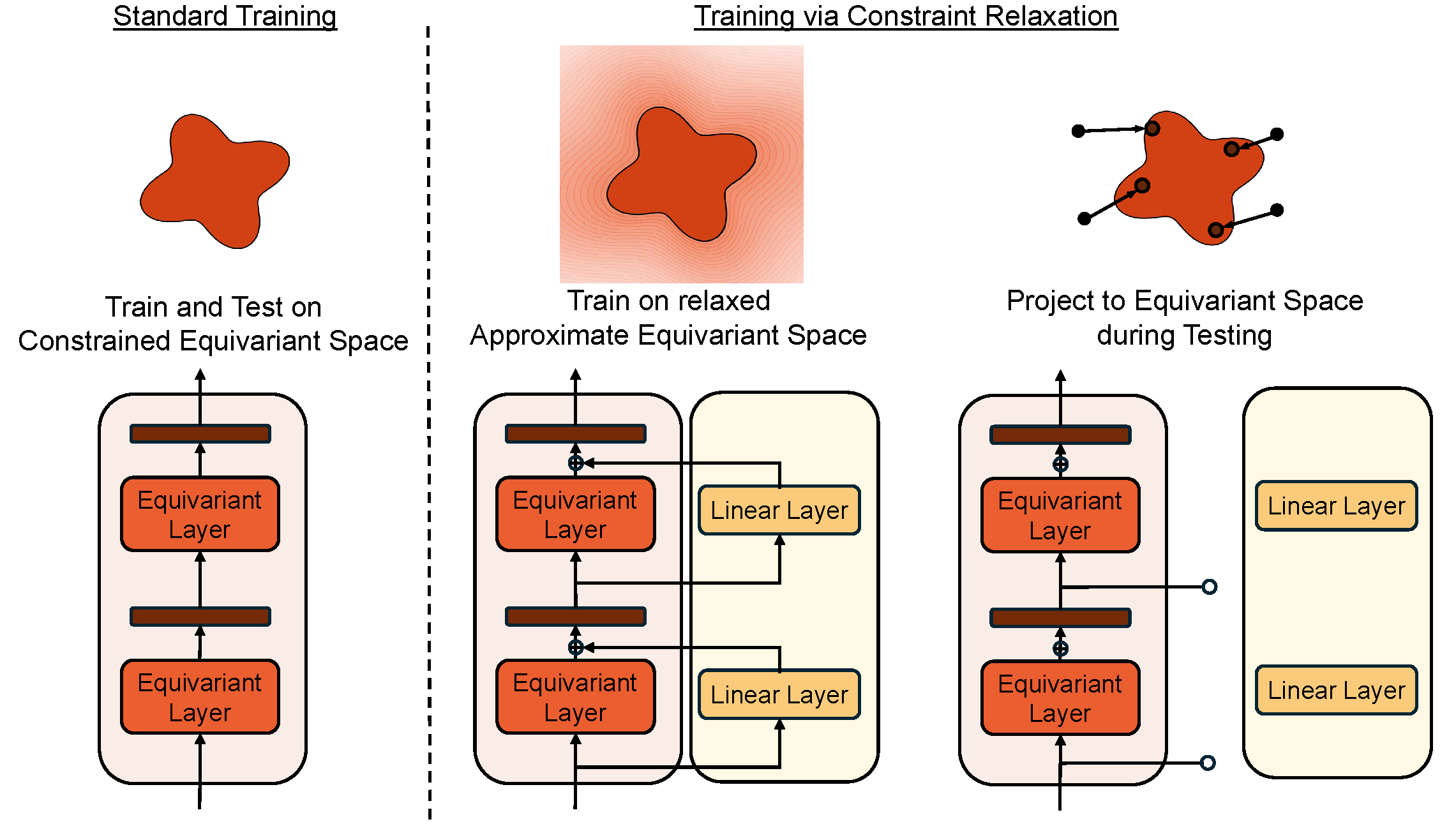
Improving Equivariant Model Training via Constraint Relaxation
Stefanos Pertigkiozoglou*, Evangelos Chatzipantazis*, Shubhendu Trivedi, Kostas Daniilidis, Advances in Neural Information Processing Systems (NeurIPS), 2024, pdf Introduced a novel method for improving the training of Equivariant Neural Networks. Specifically, we showcased how relaxing the equivariant constraint during training and projecting back to the space of equivariant models during inference can improve the overall optimization |
|
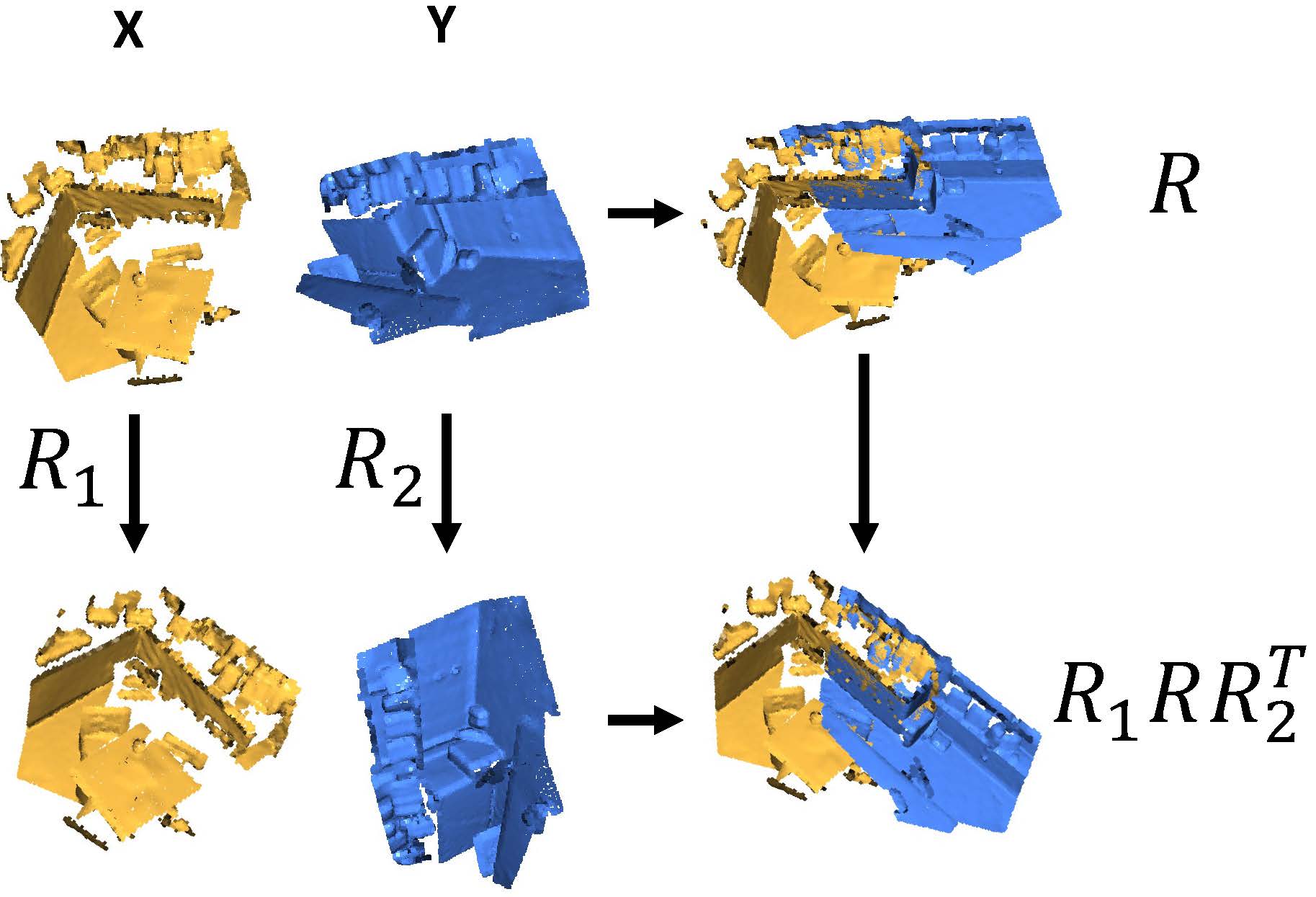
BiEquiFormer: Bi-Equivariant Representations for Global Point Cloud Registration
Stefanos Pertigkiozoglou*, Evangelos Chatzipantazis*, Kostas Daniilidis, Symmetry and Geometry in Neural Representations Workshop (NeurReps), 2024, pdf Proposed a novel point cloud registration method that utilizes bi-equivariant representations to achieve robust point cloud alignment, that is independent of the initial poses of the input point clouds. |
|
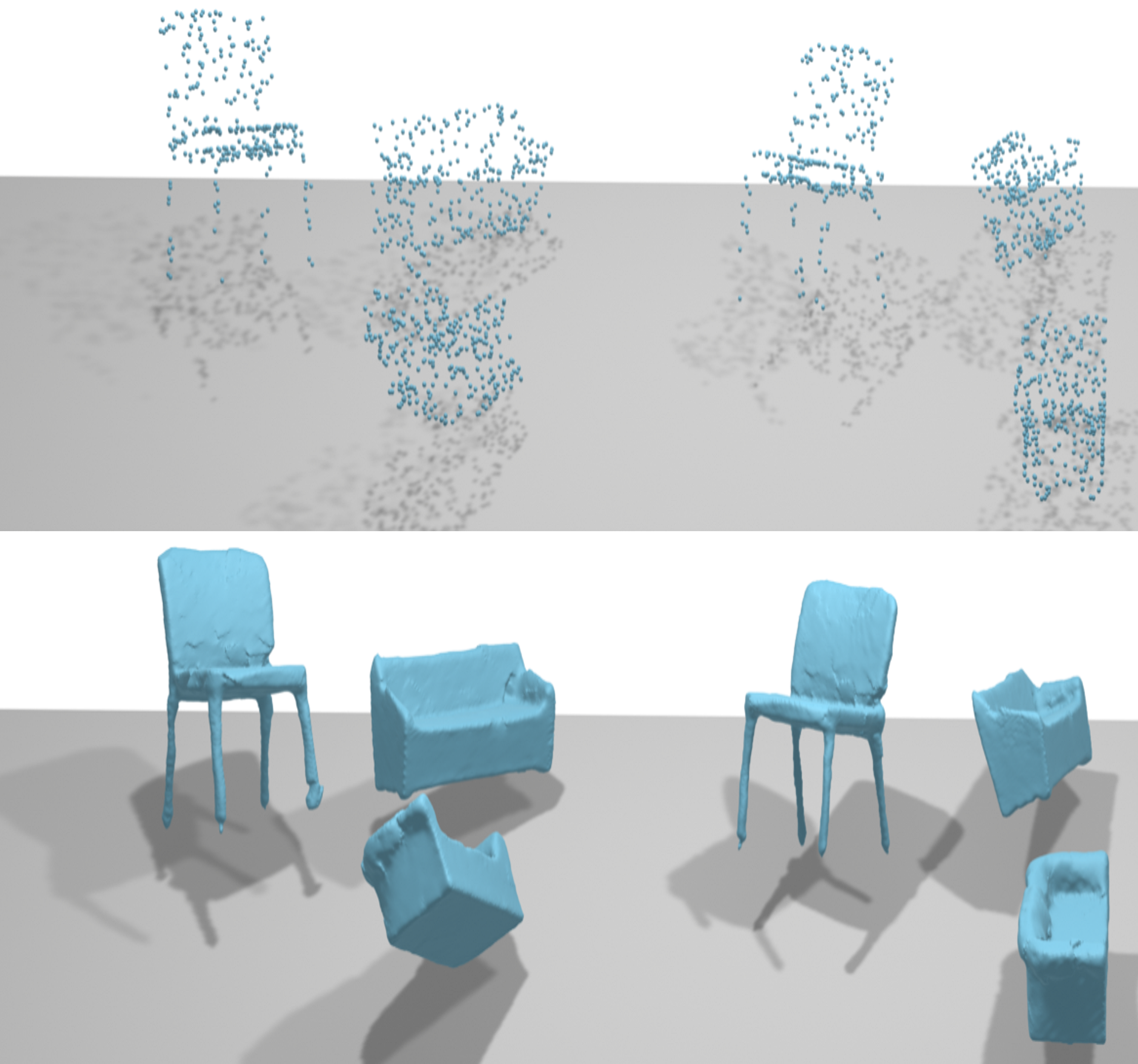
SE(3)-Equivariant Attention Networks for Shape Reconstruction in Function Space
Evangelos Chatzipantazis*, Stefanos Pertigkiozoglou*, Edgar Dobriban, Kostas Daniilidis The Eleventh International Conference on Learning Representations ICLR, 2023 project page / slides / pdf An SE(3)-Equivariant Transformer network that given input point cloud scans performs shape reconstruction. We showed how the equivariant constraint along with the use of local shape modeling enables the model that is trained on single objects to generalize to reconstruction of scenes. |
|
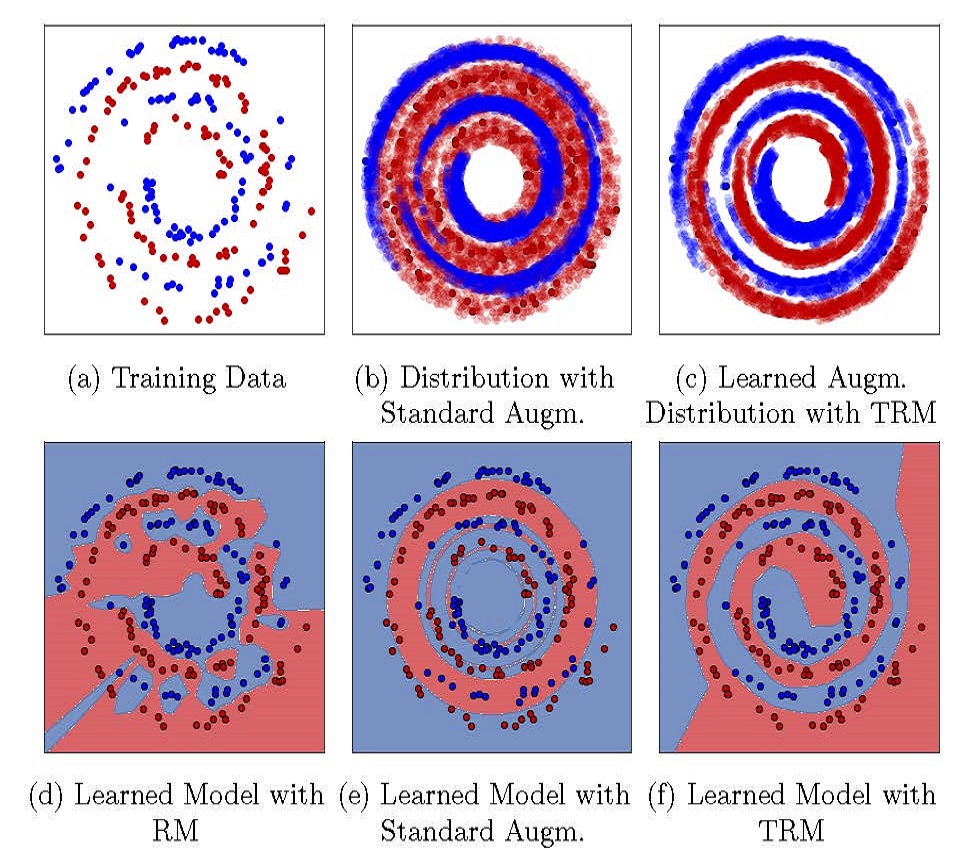
Learning Augmentation Distributions using Transformed Risk Minimization
Evangelos Chatzipantazis*, Stefanos Pertigkiozoglou*, Kostas Daniilidis, Edgar Dobriban Transaction on Machine Learning Research (TMLR), 2023, pdf Proposed Transformed Risk Minimization (TRM) as an extension of the standard risk minimization. TRM allows for simultaneously learning a model and a distribution of useful training and testing augmentations that improve the overall task performance |
 
|
Detecting Adversarial Examples in Convolutional Neural Networks
Stefanos Pertigkiozoglou, Petros Maragos arXiv, 2018, pdf Investigated the adversarial robustness of Convolutional Neural Networks and proposed different techniques for detecting inputs that are perturbed by a set of adversarial attacks. |
|
Website template from Jon Barron's page |